低空监测反制一体化平台由侦察系统、干扰系统、打击系统、一体化平台四部分组成。侦察系统主要功能是发现入侵禁飞区外围可疑目标; 干扰系统主要功能是对进入禁飞区邻近区内的目标进行干扰;打击系统对闯入禁飞区目标实施打击; 一体化平台负责系统间合成指挥作战.
1.侦察系统
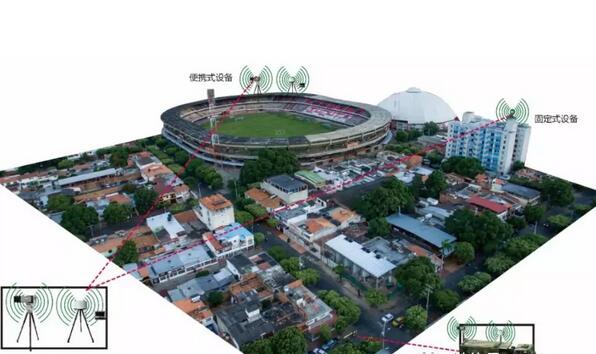
(1)频谱监测
频谱监测是通过实时测量飞行器图传信号来波方向和遥控器信号来波方向,实现对入侵的未知飞行器和遥控器的侦测。 可对0.4-6GHz的宽带内飞行器指控信号、数传信号进行侦察,获取指控、数传信号的相关信息,并根据飞行器指控、数传信号特征生成相应的干扰模式引导干扰器实施干扰。 手持式侦察设备可根据信号强度实现对 200m范围内飞行器控制信号源实施指向。
(2)三坐标相控阵低空监视雷达
采用全相控阵雷达进行组网探测,对大区域内的多批目标进行实时检测和跟踪定位。 主要针对低空(100米~3000米)、小(RCS=0.01-10m2)、慢(3km/h-400km/h)目标,单部雷达在近场环境下完成对低空飞行目标的探测,为视频跟踪、干扰和诱导、飞行器抓捕和飞行器打击提供精确定位(方位、高度、距离)。
(3)光电跟踪
光电跟踪具有全天候、速度快、覆盖面广、视距范围大、图像稳定清晰的特点,在白天通过200万日夜型网络摄像机,在夜间通过高性能非制冷型红外热成像系统发现、识别和确认目标。
2.干扰系统
(1)自适应压制干扰器
自适应压制干扰器采用超宽带频率干扰技术,不仅可实现对5Km处的GPS/GLONASS,2.4GWIFI频段、5.8GWIFI频段三个固定频段飞行器指控信号进行干扰压制,系统处理机还可以与频谱监测系统相结合,将目标信号的相关特征解析后自适应生成相应干扰方式并将相关信息写入干扰源,从而实现更加有效的干扰。
(2)欺骗式干扰器
欺骗式干扰器是通过向飞行器的控制系统发送虚假的GPS信号,对飞行器的卫星导航部件进行诱骗阻断,从而控制导航系统,诱导飞行器飞向错误的地点,达到管制黑飞飞行器的目的。
3.打击系统
(1)飞行器抓捕
飞行器捕网接收雷达提供的“低慢小”目标位置信息后,引导抓捕飞行器携带捕网对“低慢小”目标进行抓捕。
(2)微波渗入技术对飞行器进行打击
利用微波渗入技术对入侵飞行器进行打击。微波拒止设备包括蓄电池和逆变器组成的主电源单元、高压电源单元、高能脉冲发生器和辐射器阵列单元。辐射系统被安装在转台上,通过机械方式实现辐射波束方位面切换。通过电磁波渗入目标系统,在一个信号线或电源线上产生感应电流或电压发生振荡,扰乱甚至破坏目标电子系统和电子部件的运行系统。
4.低空监测反制一体化平台组成
飞行器监测反制系统管理软件是将各个模块、设备的功能有效融合在一张图上进行管理使用。其中包括地图定位模块、视频监控模块、告警模块、联动打击以及设备管理模块等。其中,地图定位模块用于频谱检测、雷达监测及定位;视频模块包括普通长焦锐头及红外热成像设备捕捉到的实时视频;告警模块集成频谱检测、雷达监测报警为一体;联动打击模块将飞行器捕网、干扰设备、GPS诱导以及微波拒止等设备使用集成在一起;设备管理模块对各个设备的设备状态进行监控。


暂无评论





